3.0 KiB
3.0 KiB
| title | categories | date | draft | ||
|---|---|---|---|---|---|
| Робот с дистанционным управлением |
|
2017-02-23T00:00:00+03:00 | true |
Черновик
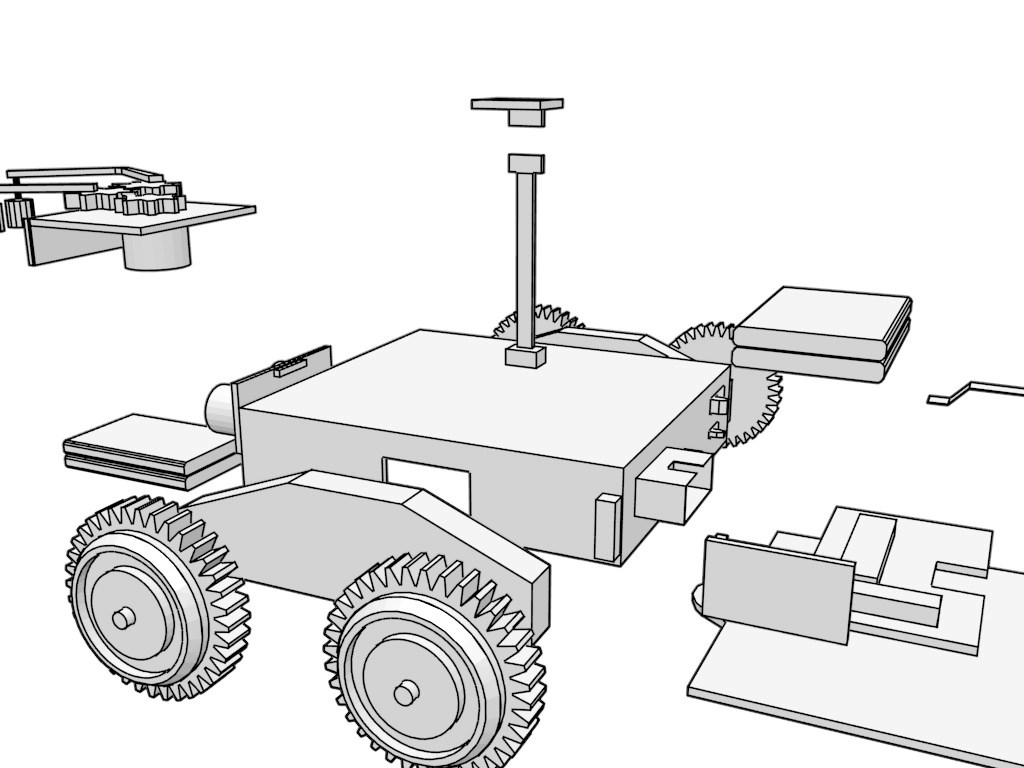
Робот с управлением по беспроводному каналу связи. В качестве радиомодулей используются недорогие радиомодули nrf24l01. Управляющим контроллером робота является ATmega8, программа написана на языке c.
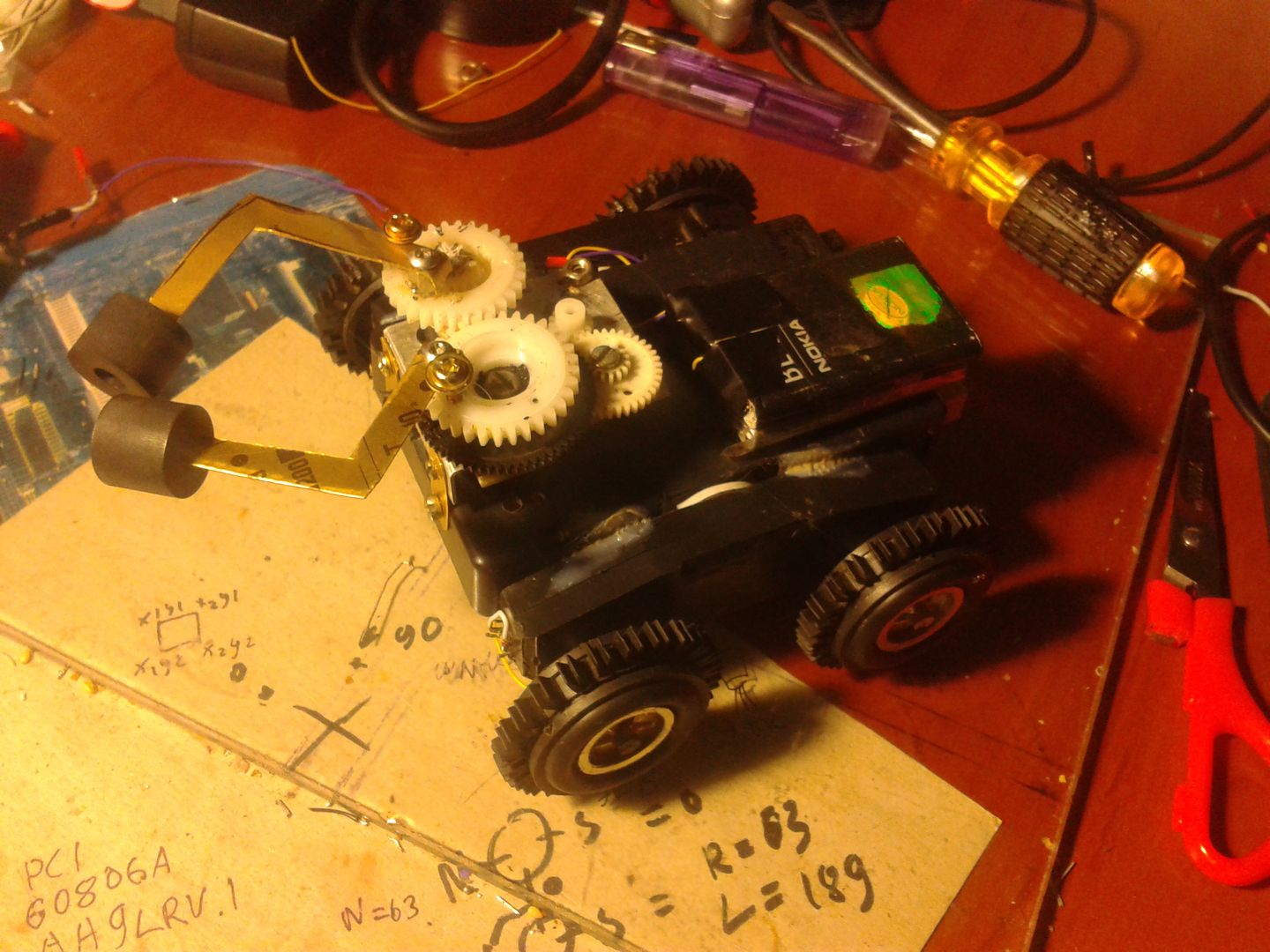
Для перемещения робота используются два независимых друг от друга шасси.
Робот оснащён следующими датчиками:
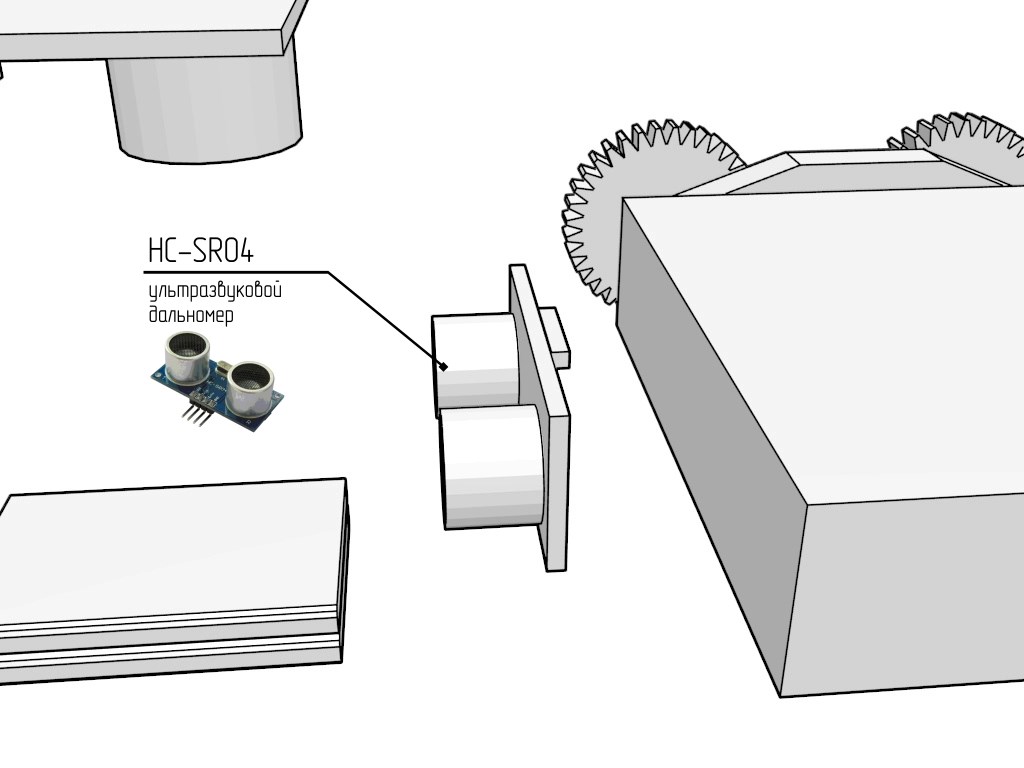
- Расстояния. С помощью датчика расстояния (дальномера) робот может находить препятствия и отправлять расстояние них пользователю. Однако основное назначение датчика - находить объекты, которые можно подобрать захватом. В качестве датчика расстояния служит ультразвуковой дальномер HC-SR04.
- Препятствия. Датчик находится непосредственно под захватом. Датчик служит для подтверждения удачного захвата объекта роботом.
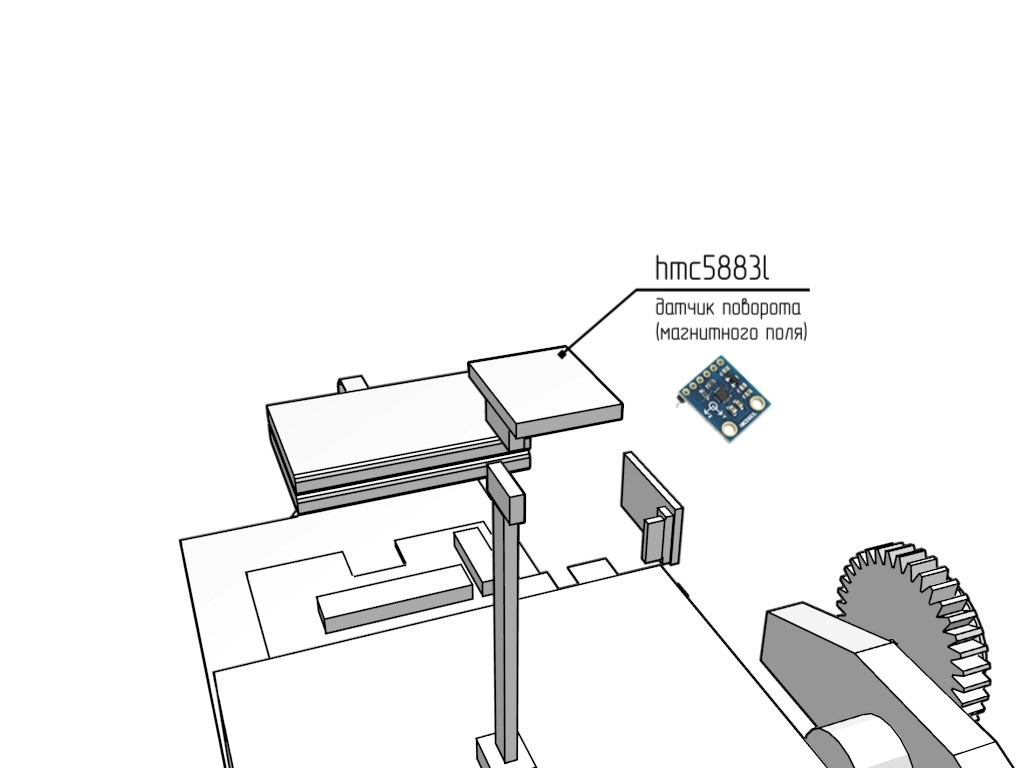
- Поворота (электронный компас). Наличие этого датчика добавляет роботу понятие текущего угла поворота, что важно для сканирования на предмет препятствий или объектов для захвата. Модель датчика - HMC5883L.
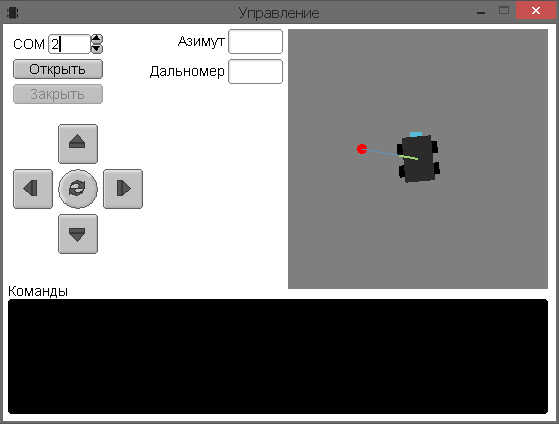
Робот также оснащён манипулятором для выполнения "полезной" работы. Управление роботом происходит с компьютера через особый модуль ([usb]->ft232->[uart]->atmega8->[SPI]->nrf24l01). Программа для визуального наблюдения за роботом написана на языке c, подключена библиотека fltk, использовались платформонезависимые функции, благодаря чему программа собирается и запускается не только на Windows.
Немного фото:

{{< youtube _36egDgc_6s >}}